1.简介
bcache是linux内核块设备层cache,类似于flashcache使用ssd作为hdd的缓存方案,相比于flashcache,bcache更加灵活,支持ssd作为多块hdd的共享缓存,并且还支持多块ssd(还未完善),能够在运行中动态增加,删除缓存设备和后端设备。从3.10开始,bcache进入内核主线。bcache支持writeback、writethrough、writearoud三种策略,默认是wriththrough,可以动态修改,缓存替换方式支持lru、fifo和random三种。下面从几个方面介绍bcache的实现机制。
2.总体结构
bcache的整体结构如图所示。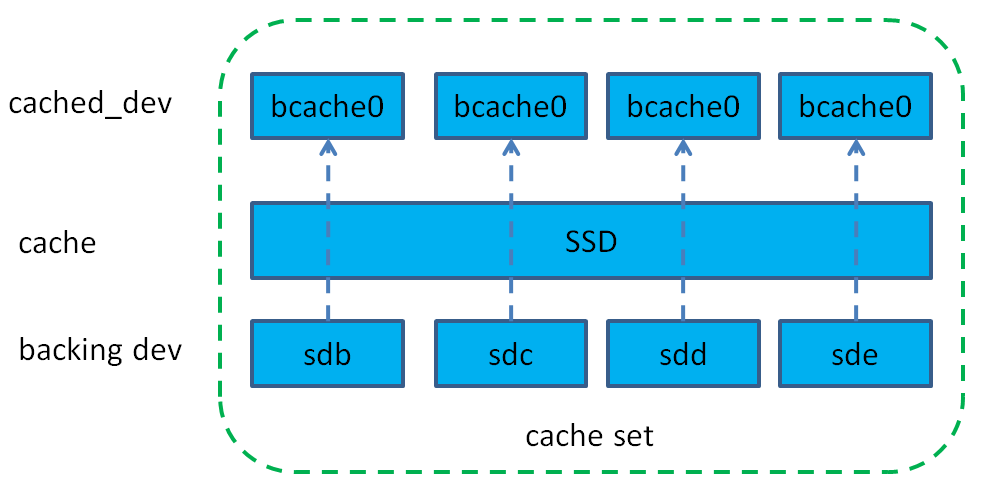
bcache中是以cache set来划分不同存储集合,一个cache set中包含一个或多个缓存设备(一般是ssd),一个或多个后端设备(一般是hdd)。bcache对外输出给用户使用的是/dev/bcache
3.bcache关键结构
3.1 bucket
缓存设备会按照bucket大小划分成很多bucket,bucket的大小最好是设置成与缓存设备ssd的擦除大小一致,一般建议128k~2M+,默认是512k。每个bucket有个优先级编号(16 bit的priority),每次hit都会增加,然后所有的bucket的优先级编号都会周期性地减少,不常用的会被回收,这个优先级编号主要是用来实现lru替换的。bucket还有8bit的generation,用来invalidate bucket用的。
bucket内空间是追加分配的,只记录当前分配到哪个偏移了,下一次分配的时候从当前记录位置往后分配。另外在选择bucket来缓存数据时有两个优先原则:1)优先考虑io连续性,即使io可能来自于不同的生产者;2)其次考虑相关性,同一个进程产生的数据尽量缓存到相同的bucket里。
3.2 bkey
bucket的管理是使用b+树索引,而b+树节点中的关键结构就是bkey,bkey就是记录缓存设备缓存数据和后端设备数据的映射关系的,其结构如下。1
2
3
4
5struct bkey {
uint64_t high;
uint64_t low;
uint64_t ptr[];
}
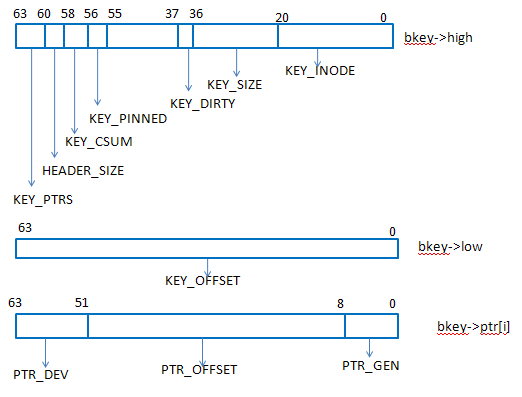
其中:
- KEY_INODE:表示一个后端设备的id编号(后端设备在cache set中一般以bdev0,bdev1这种方式出现)
- KEY_SIZE:表示该bkey所对应缓存数据的大小
- KEY_DIRTY:表示该块缓存数据是否是脏数据
- KEY_PTRS:表示cache设备的个数(多个ptr是用来支持多个cache设备的,多个cache设备只对脏数据和元数据做镜像)
- KEY_OFFSET:bkey所缓存的hdd上的那段数据区域的结束地址
- PTR_DEV:cache设备
- PTR_OFFSET:在缓存设备中缓存的数据的起始地址
- PTR_GEN:对应cache的bucket的迭代数(版本)
3.3 bset
一个bset是一个bkey的数组,在内存中的bset是一段连续的内存,并且以bkey排序的(bkey之间进行比较的时候是先比较KEY_INODE,如果KEY_INODE相同,再比较KEY_OFFSET)。
bset在磁盘上(缓存设备)有很多,但是内存中一个btree node只有4个bset。4. bcache中的b+树
4.1 btree结构
bcache中以b+tree来维护索引,一个btree node里包含4个bset,每个bset中是排序的bkey。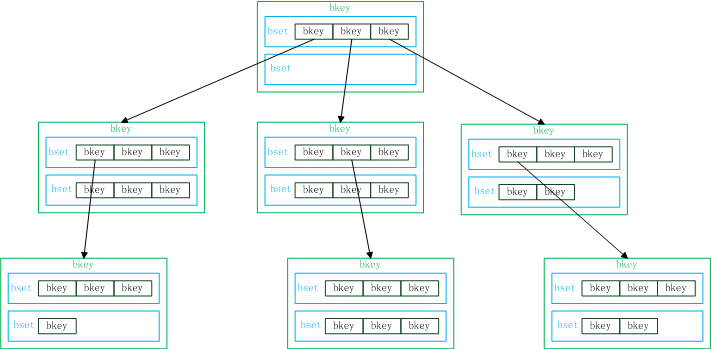
图中做了简化,一个btree node只画了两个bset。
每个btree node以一个bkey来标识,该bkey是其子节点中所有bkey中的最大值,不同于标准的b+树那样,父节点存放子节点的地址指针,bcache中的b+树中非叶子节点中存放的bkey用于查找其子节点(并不是存的地址指针),而是根据bkey计算hash,再到hash表中取查找btree node。叶子节点中的bkey存放的就是实际的映射了(根据这些key可以找到缓存数据以及在hdd上的位置)。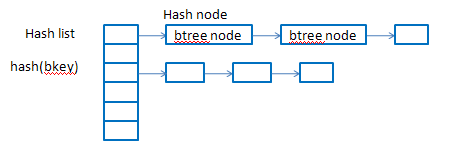
bkey插入到b+树中的过程与标准的b+树的插入过程类似,这里不做细讲。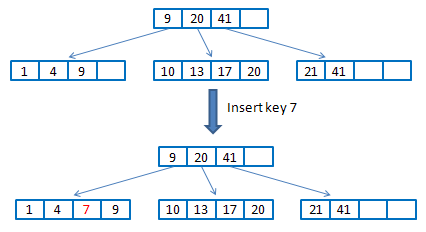
4.2 btree插入bkey时overlapping的处理
收到新的写io时,这个io对应hdd上的数据可能有部分已经缓存在ssd上了,这个时候为这个io创建的bkey就需要处理这种overlapping的问题。
Btree node 是log structured,磁盘上的btree node有可能有overlap的情况,因为是在不同时候写入的。但是内存中的btree node不会有overlap,因为插入bkey时如果和内存中的bkey有overlap,就会解决overlap的问题;另外,从磁盘上读出btree node时就会把bsets中的bkey做归并排序,就会检查overlap的问题并进行解决。
下图给出了一个示例情况。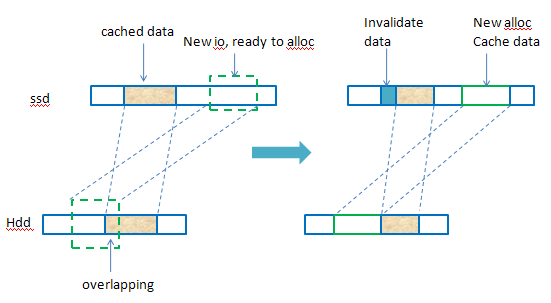
出现这种overlapping的情况,原来的bkey会做修改(ssd和hdd上的偏移都会修改,还有数据大小)。
插入key或者查找key时,使用待处理的key的start来遍历bset中的bkey(bset中的bkey排序了),找到可能存在overlapping的第一个key,如下图描述的两种情况。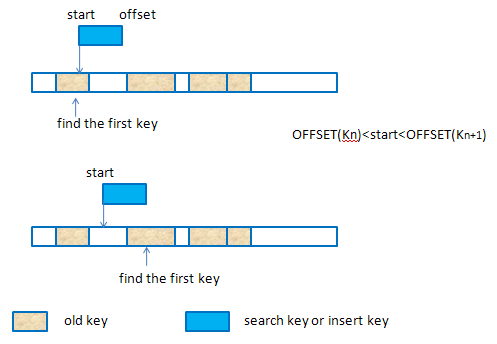
要处理的overlapping情况有以下几种: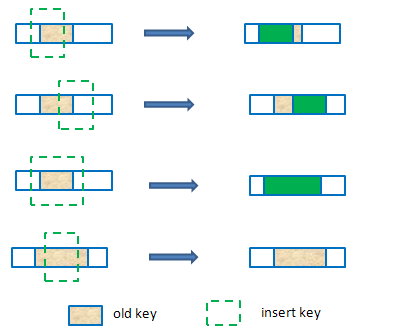
读数据的时候也有可能出现这种部分命中,部分miss的情况,本质上和插入key处理overlapping的一样,只不过命中的部分从cache设备中读,miss的部分是从hdd读,并且会重新插入一个新的key来缓存这部分miss的数据。
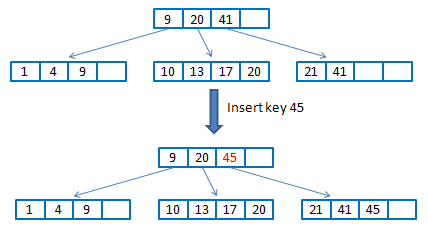
4.3 btree node split
b+树节点有最大大小限制,在新创建一个btree node时就在内存中分配了一段连续的空间来存放bset及bkey(按照指定的内存pages数),如果超过这个pages数,btree node就会分裂。
在进行key的插入时,递归进行插入,到叶子节点上如果需要分裂,则会以3/5节点大小分裂成2个节点,把分裂成的两个节点的最大key通过op传到上层函数调用中,叶子节点这层函数退出后,在上一层的函数里就会把op中的key添加到keys中(这样就修改了父节点的指针),如果这一层还需要分裂,跟之前的分裂过程一致,分裂后的节点都会立即持久化到ssd中。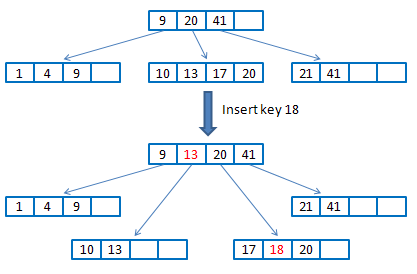
5. writeback
bcache支持三种缓存策略:writeback,writethrough,writearoud。writethrough就是既写ssd也写hdd,这样读的时候如果命中的话就可以从ssd中读,适应于读多写少的场景;writearoud就是绕过ssd直接读写hdd,个人感觉这种方式没啥意义;writeback就是ssd做写缓存,所有的写入都是先写缓存,然后会在后台刷脏数据,这里主要介绍writeback。
上文提到bucket内是以追加的方式来分配空间的,一个bucket里面缓存的数据可能对应hdd上的不同位置,甚至有可能在不同的hdd。不同于flashcache以set为单位刷脏数据(等同于bcache中的bucket),bcache中以bkey为单位来writeback,而不是以bucket为单位。每个cache set都有一个writeback_keys,记录需要writeback的bkeys。当满足刷脏数据的条件时(脏数据比例),就会遍历整个b+树,查找dirty的bkey,放到writeback_keys中(writeback_keys有个大小限制),然后按照磁盘偏移排序,再进行刷脏数据的动作,数据写到hdd后,会把对应的bkey从writeback_keys移除,并去掉该bkey的dirty标记。这样的好处在于刷脏数据的时候可以尽量考虑hdd上的连续性,减少磁头的移动,而如果以bucket为单位刷,一个bucket可能缓存hdd上不同位置的数据,比较随机,刷脏数据的效率不高。
既然bucket内的空间分配是按照追加的方式,每次都是从后面开发分配,而刷脏数据又不是以bucket为单位,那么就会出现bucket中有空洞的情况(bucket中间有些数据已经刷到磁盘上了),导致bucket已用空间不多,但是很多空闲空间比较分散,从后面分配又空间不足。对于这种情况,bcache中又专门的垃圾回收机制(gc),会把这种情况的bucket给回收掉,从而可以重新使用这个bucket。
writeback方式虽然性能比较高,但是会出现意外宕机情况下的恢复问题。对于这种情况,bcache能够很好地处理。在引入journal之前(后面会介绍),在数据写入到缓存ssd中后,io并没有返回,而是等到相应的btree node也持久化后,再返回写成功,这样意味着每次写io都会写元数据,宕机的情况下就能够根据元数据恢复出来,不过这种方式就导致每次都要写元数据,而元数据的io都比较小,对于ssd来说,小io有写放大的问题,导致了效率低下。引入journal后,就解决了这个性能问题。
6. journal
journal不是为了一致性恢复用的,而是为了提高性能。在writeback一节提到没有journal之前每次写操作都会更新元数据(一个bset),为了减少这个开销,引入journal,journal就是插入的keys的log,按照插入时间排序,只用记录叶子节点上bkey的更新,非叶子节点在分裂的时候就已经持久化了。这样每次写操作在数据写入后就只用记录一下log,在崩溃恢复的时候就可以根据这个log重新插入key。
7. garbage colletction
gc的目的是为了重用buckets。初始化cache时会在bch_moving_init_cache_set中会初始化一个判断bkey是否可以gc的函数moving_pred,该函数就是判断该key所对应的bucket的GC_SECTORS_USED是否小于cache->gc_move_threshold,如果是则可以gc,否则不能。
gc一般是由invalidate buckets触发的。bcache使用一个moving_gc_keys(key buf,以红黑树来维护)来存放可以gc的keys,gc时会扫描整个btree,判断哪些bkey是可以gc的,把能够gc的bkey加到moving_gc_keys中,然后就根据这个可以gc的key先从ssd中读出数据,然后同样根据key中记录的hdd上的偏移写到hdd中,成功后把该key从moving_gc_keys中移除。
8.总结
bcache相对于flashcache要复杂很多,使用b+树来维护索引就可见一斑。虽然bcache已经进入了内核主线,但是目前使用bcache的人还是比较少的,离商用还有一段距离。bcache还不太稳定,时不时有些bug出现,而且其稳定性需要比较长的时间来检测。而flashcache来说就稳定很多,而且有facebook作为其最大的维护者,国内外还有很多公司也在使用,成熟度是公认的。